关键词 |
津市冲压机器人,冲压机器人供应商,北京冲压机器人,浏阳冲压机器人 |
面向地区 |
全国 |
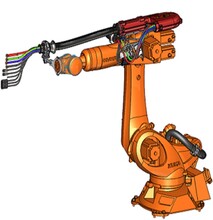
驱动系统是向机械结构系统提供动力的装置。根据动力源不同,驱动系统的传动方式分为液压式、气压式、电气式和机械式4种。早期的工业机器人采用液压驱动。由于液压系统存在泄露、噪声和低速不稳定等问题,并且功率单元笨重和昂贵,目前只有大型重载机器人、并联加工机器人和一些特殊应用场合使用液压驱动的工业机器人。
气压驱动具有速度快、系统结构简单、维修方便、价格低等优点。但是气压装置的工作压强低,不易定位,一般仅用于工业机器人末端执行器的驱动。气动手抓、旋转气缸和气动吸盘作为末端执行器可用于中、小负荷的工件抓取和装配。电力驱动是目前使用多的一种驱动方式,其特点是电源取用方便,响应快,驱动力大,信号检测、传递、处理方便,并可以采用多种灵活的控制方式,驱动电机一般采用步进电机或伺服电机,目前也有采用直接驱动电机,但是造价较高,控制也较为复杂,和电机相配的减速器一般采用谐波减速器、摆线针轮减速器或者行星齿轮减速器。由于并联机器人中有大量的直线驱动需求,直线电机在并联机器人领域已经得到了广泛应用。
控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统。根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和连续轨迹控制。
并且已经从较为成熟的行业延伸到食品,医疗等领域。由于机器人技术发展迅速,与传统工业设备相比,不仅产品的价格差距越来越小,而且产品的个性化程度高,因此在一些工艺复杂的产品制造过程中,可以让工业机器人替代传统设备,这样就可以在很大程度上提高经济效率。根据数据统计显示,从2016年到2017年,全球工业机器人的总销量已经从29.4万台突破到34.6万台。可见工业机器人应用范围之广。
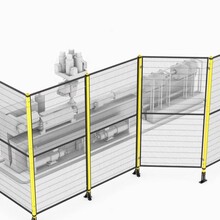
生产效率及安全性高,机械手,顾名思义,通过仿照人类的手型而生产出来的机械手,它生产一件产品耗时是固定的。同样的生存周期内,使用机械手的产量也是固定的,不会忽高忽低。并且每一模的产品生产时间是固定化,产品的成品率也高,使用机器人生产更符合老板利益。工厂采用工业机器人生产,是可以解决很多安全生产方面的问题。对于由于个人原因,如不熟悉工作流程、工作疏忽、疲劳工作等导致安全生产隐患,统统都可以避免了。
易于管理,经济效益显著,企业可以很清晰的知道自己每天的生产量,根据自己所能够达到的产能去接收订单和生产商品。而不会去盲目预估产量或是生产过多产品产生浪费的现象。而工厂每天对工业机器人的管理,也会比管理员工简单得多。工业机器人可以24小时循环工作,能够做到生产线的大产量,并且无需给予加班的工时费用。对于企业来说,还能够避免员长期高强度工作后产生的疲劳、生病带来的请假等误工的情况。生产线换用工业机器人生产后,企业生产只需要留下少数能够操作维护工业机器人的员工对工业机器人进行维护作业就可以了。经济效益非常的显著。
一般工业机器人是一个串联悬臂式结构,刚性弱,运动复杂,容易发生变形和抖动,是一个需要运动学和动力学相结合的课题。为了改善机器人的动态性能和提高运动精度,机器人控制系统建立动力学模型,进行动力学补偿。补偿的内容主要包括重力补偿、惯量补偿、摩擦补偿、耦合补偿等。机器人机械本体由于加工误差和装配误差的原因,难以避免会和理论数学模型存在偏差,会降低机器人TCP精度和轨迹精度,如在焊接和离线编程使用时会受到严重影响。通过检测和算法标定补偿机器人的模型参数,可以较好地解决此问题。
工艺包完善,控制系统要与实际工程应用相结合,系统除不断升级,功能更加强大外,还要根据行业应用的需求不断开发和完善工艺包,有利于积累行业工艺经验,对客户来说使用更方便,操作更简单,效率更高。在工业生产中,零件的装配是一件工程量的工作,需要大量的劳动力,曾经的人力装配因为出错率高,效率低而逐渐被工业机器人代替。装配机器人的研发,结合了多种技术,包括通讯技术、自动控制、光学原理、微电子技术等。研发人员根据装配流程,编写合适的程序,应用于具体的装配工作。装配机器人的大特点,就是安装精度高、灵活性大、程度高。因为装配工作复杂精细,所以我们选用装配机器人来进行电子零件,汽车精细部件的安装。
机器人的安装是在在现场进行的,而真正的生产作业环境会受空间利用率等方面影响,致使机器人的很多姿态受到一定的限制,而这就很容易导致工业机器人在实际工作中,出现震动、移位等现象,并终导致工业机器人无法按照设计的速度运作,因此在工业机器人安装结束后,投入实际生产工作前,进行现场调试校准就显得至为重要。