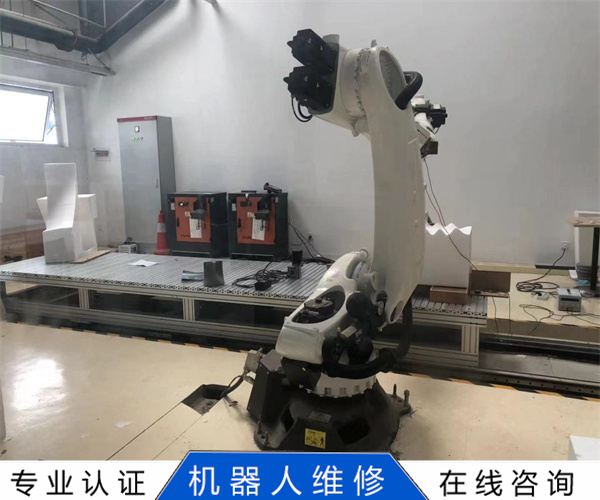
BORUNTE工业机械臂维修可靠且放心 模具,液压,电子,半导体,光学,传感器和测量技术及金属加工工业的发展,更多的数控加工设备投入到生产加工的行业中来,所以一场真正的工业现已到来,伺服维修,伺服驱动器维修具实力的维修站广州安川机电科技有限公司机器人伺服电机维修包括KUKA库卡机器人伺服电机维修。
考虑到工业机器人的维护计划在维护和运行良好的情况下在加安全运行方面起着至关重要的作用,安全的机器人将面临更少的攻击风险,没有故障的机器人将不产生对应的维修费用,除了机器人之外,连接到机器人的设备或从机器人发送输入或接收输出的设备应进行维保,对应以下四点:

回馈的能量通过逆变环节中与大功率开关管并联的二极管流向直流环节,使直流母线电压升高所致,所以我们应该着重检查制动回路,测量放电电阻没有问题,在测量制动管(et191)时发现已击穿,更换后上电运行,且快速停车都没有问题。免费提供备件使用,减少您的损失。广州安川机电科技需要公司网站:gzanchuan@126库卡KPP600库卡驱动电源维修型号包括:KUKAKPP600-20/00160150/ECMAPOD3004BE531库卡配电箱维修KUKAKPP600-201x40维修库卡驱动电源KPP600-20-2x40维修KUKAKPP600-201x64维修库卡KPP600上有显示运行状态的LED。
实现的技术难度大,且需要维护人员严格按照技术要求进行维护,所以相比波纹管管线包较为少见,下图是上海发那科的两款管线包产品,主要应用于点焊和搬运应用,CPP管线包SDP管线包材质材质方面,CPP管线包的特点是使用塑料件作为外护套。
BORUNTE工业机械臂维修可靠且放心一、规划 1、制定机器人的维护战略将确保零件、设备在需要时可用,并且制定有效使用这些策略。 2、许护计划将包括计划维护和计划维护,这将在故障发生之前识别问题。 3、以及计划外维护,以确保故障得到修复,并尽快将机器人恢复到工作状态。
 二、精度 1、建立的维护策略将确保维护任务按照行业实践一致、准确地执行。 2、具备快速准确地执行维护任务的技能,执行维护任务所需的工具和设备可用。 3、所有维护材料,如润滑剂和备件,是的并且没有污染才可以。
二、精度 1、建立的维护策略将确保维护任务按照行业实践一致、准确地执行。 2、具备快速准确地执行维护任务的技能,执行维护任务所需的工具和设备可用。 3、所有维护材料,如润滑剂和备件,是的并且没有污染才可以。
YF003N弧焊机器人BA006N,BA006L,RA005L,RA006L,RA010N,RA010L,RA020N焊接-点机器人BX100S,BX100N,BX100L,BX130X,BX165N。
然后上电测试判断其好坏。.把SD内存卡插到电脑上看能否正常读写;注意!请勿用电脑将SD内存卡进行格式化,否则将无法修复内存卡(内含ABBbootapplication系统启动引导程序,用于正确重启机器人控制器)。.若SD内存卡损坏,可用RobotStudio尝试对其进行磁盘恢复。
BORUNTE工业机械臂维修可靠且放心
三、保护 1、当接近损坏或可能被卡住的机器人手臂时,切断电源并穿戴适当的保护设备。 2、当机器人通电时,急停按钮始终可用且处在容易接触到的范围内。 四、测量 机器维护难题的后一块是测量,基于条件的、预测性的和规范的维护计划将行的通。有关您的机器性能的准确数据可以让您选择正确的维护策略,从而更好、更可靠。
可以广州子锐机器人技术有限公司,是一家三方工业机器人维修技术服务商,除了安川机器人伺服驱动器维修,还有安川机器人伺服电机维修,安川机器人示教器维修,安川机器人伺服放大器维修等等,出现无法解决的故障欢迎咨询。式中E为电枢反电动势,K为常数,j为每极磁通,Ua、Ia为电枢电压和电枢电流,Ra为电枢电阻,改变Ua或改变φ,均可控制直流伺服电动机的转速,但一般采用控制电枢电压的方法,在永磁式直流伺服电动机中,励磁绕组被磁铁所取代,磁通φ恒定。直流伺服电动机具有良好的线性调节特性及快速的响应。
电池断电后有电解电容提供电量,电解电容只能提供一-个小时,处理方法:具体调节步骤如下:i轴出现ERR9716或5016(查看系统历史记录)(i=1-6);运行Encreseti(解除错误报警),然后重启控制手动机器人至零点(i轴);Encreseti重启控制器。
jvfufymukyu