





产品别名 |
机械手,铸造机械手品牌,破碎机械手厂家,机械手臂多少钱一台 |
面向地区 |
全国 |
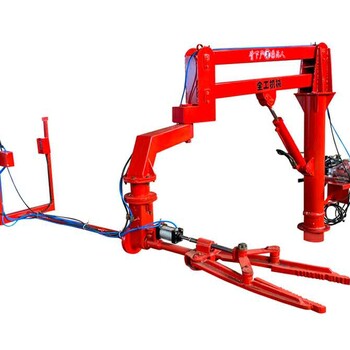
机械手是早出现的工业机器人,也是早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由执行机构、驱动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。
机械手的执行机构分为手部、手臂、躯干;
1、手部
手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。
机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的多。可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。
2、手臂
手臂的作用是引导手指准确地抓住工件,并运送到所需的位置上。为了使机械手能够正确地工作,手臂的3个自由度都要地定位。
3、躯干躯干是安装手臂、动力源和各种执行机构的支架
机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。
其中插销板使用于需要迅速改变程序的场合。换一种程序只需抽换一种插销板限可,而同一插件又可以反复使用;穿孔带容纳的程序长度可不受限制,但如果发生错误时就要全部更换;穿孔卡的信息容量有限,但便于更换、保存,可重复使用;磁蕊和磁鼓仅适用于存储容量较大的场合。至于选择哪一种控制元件,则根据动作的复杂程序和程序来确定。对动作复杂的机械手,采用求教再现型控制系统。更复杂的机械手采用数字控制系统、小型计算机或微处理机控制的系统。控制系统以插销板用的多,其次是凸轮转鼓。它装有许多凸轮,每一个凸轮分配给一个运动轴,转鼓运动一周便完成一个循环。
机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件。
随着网络技巧的发展,机械手的联网操作问题也是以后发展的方向。工业机器人是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。