





关键词 |
扬州控制,T8312模块,UAC326AE模块,T9110模块 |
面向地区 |
全国 |
伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器已经成为国内外研究热点。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置三闭环控制算法。该算法中速度闭环设计合理与否,对于整个伺服控制系统,特别是速度控制性能的发挥起到关键作用。
在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度坏的转速控制动静态特性至关重要。为寻求测量精度与系统成本的平衡,一般采用增量式光电编码器作为测速传感器,与其对应的常用测速方法为M/测速法。M测速法里然具有一定的测量精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括:1)测速周期内检测到至少一个完整的码盘脉冲,限制了低可测转速;2)用于测速的2个控制系统定时器开关难以严格保持同步,在速度变化较大的测量场合中无法测速精度。因此应用该测速法的传统速度环设计方案难以提高伺服驱动器速度跟随与控制性能
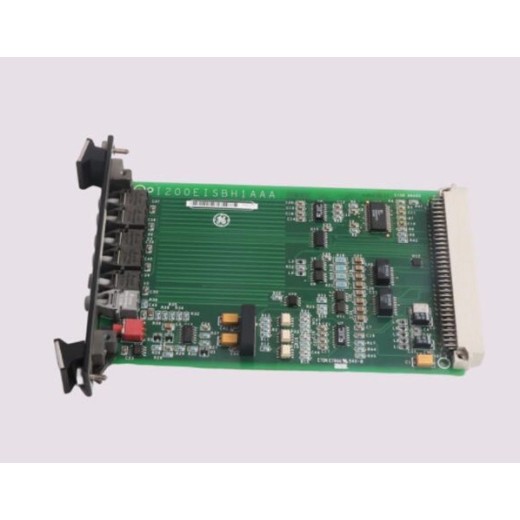
驱动模块是用来模拟被测试模块的上模块,相当于被测模块的主程序。它接收数据,将相关数据传送给被测模块,启用被测模块,并打印出相应的结果。传统的单元测试包括了驱动模块(driver) 和桩模块(stub)。驱动模块的目的很单纯,就是为了访问类库的属性和方法,来检测类库的功能是否正确;驱动模块是用来模拟被测试模块的上模块,相当于被测模块的主程序。它接收数据,将相关数据传送给被测模块,启用被测模块,并打印出相应的结果。如果被测试模块中的函数是提供给其他函数调用的,在设计测试用例时就应该设计驱动模块(Driver)。
举例来说:驱动模块(Driver)可以通过模拟一系列用户操作行为,比如选择用户界面上的某一个选项或者按下某个按钮等,自动调用被测试模块中的函数。驱动模块(Driver)设置,使对模块的测试不必与用户界面真正交互。
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
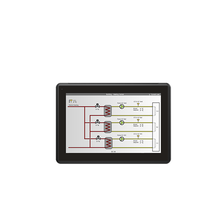
控制系统其实从20世纪40年代就开始使用了,早期的现场基地式仪表和后期的继电器构成了控制系统的前身。以PLC和DCS为代表,从70年****始应用以来,在冶金、电力、石油、化工、轻工等工业过程控制中获得迅猛的发展。从90年****始,陆续出现了现场总线控制系统、基于PC的控制系统等,将简要介绍各种常见的控制系统,并分析控制系统的演进过程和发展方向。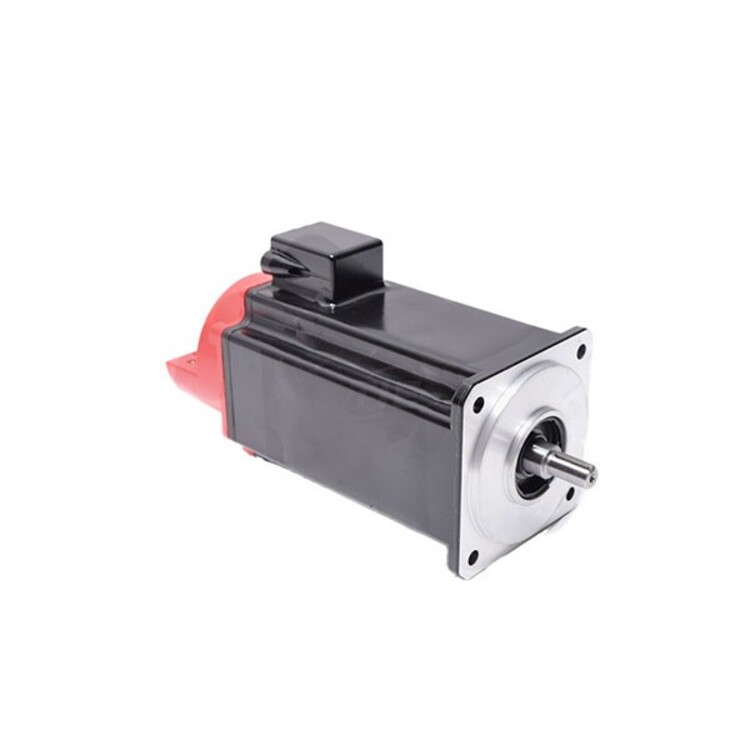
70年代中期,由于设备大型化、工艺流程连续性要求高、要控制的工艺参数增多,而且条件苛刻,要求显示操作集中等,使已经普及的电动单元组合仪表不能完全满足要求。在此情况下,业内厂商经过市场调查,确定开发的DCS产品应以模拟量反馈控制为主,辅以开关量的顺序控制和模拟量开关量混合型的批量控制,它们可以覆盖炼油、石化、化工、冶金、电力、轻工及市政工程等大部分行业。

————— 认证资质 —————
全国控制热销信息