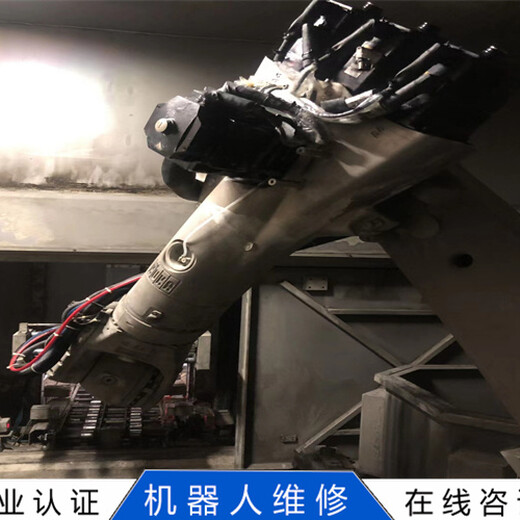
kawasaki机器人LED2红灯亮故障维修 焊接机械手维修 检查电缆的包覆有无损伤,是否发生局部弯曲或扭曲,同时,请检查各电机的连接器是否松动,连接器检修部位J1可动部,J2手臂后方的手腕姿势保持连杆上下端,J2J3连接部,J3J4连接部的可动部与外围设备容易干涉的固定部电缆有关J2J3连接部。
从增加机器人寿命和可靠性到降低启动问题的风险,拥有一支经验丰富的团队,拥有工具和知识,可以在不耽误之后的情况下快速完成,这一点至关重要。通过寻找您可以信任的维修服务公司,可以计划内的维护人员完成相应的维护工作。
可程度减少过喷现象,并确保漆膜的均匀一致,ABB喷涂机器人IRB5400系列省时,省料的优势定能获得您的青睐,喷涂机器人IRB5400将换色阀,漆料泵和流量传感器和空气/漆料调节器,集成到手臂上在同类喷涂机器人中是可靠性强。另外紧急客户可以提供KUKA机器人伺服组件KSP相应同型号的备件供客户使用,避免因机器人损坏而造成停产售后:出仓维修件KUKA机器人KSPECMAS3D2224BE531伺服组件都经过检测,有安装到我方机器人上测试,确实送到客户方能正常使用,避免无法测试返修给客户带来设备测试风险和停机损失。
机械手维修凌科 1、公司规模的不断壮大,为我们的客户提供的维修及保养服务。 2、对前来公司维修的客户,我们会有人员与其对接,采用一对一式的服务。 3、公司在同行业之中一直处于位置,每年维修总量也很多。 4、公司成立之初到如今的发展,一直秉承着客户至上的原则。
内部有断线等(更换数据线)史陶比尔机器人示教器维修,STAUBLI机器人示教盒维修,史陶比尔机器人教导盒维修,史陶比尔示教器sp1机器人维修,维修史陶比尔离子切割机器人放大电路,及检测电路的光耦,此外电机抖动。
更换编码器线,抱闸线后,复位该报警后显示报警号为SRVO-062BZAL异常(G∶2A∶1),进行脉冲复位并校准该轴零点后设备恢复正常,如图1所示。(2)FANUCM—10i弧焊机器人在自动运行过程中出现停机并报警:SRVO-046OVC异常(G:2A:1)SRVO-024移动时误差过大(G∶2A∶1)SRVO-124确认机械塞子(G∶2A∶1)。
kawasaki机器人LED2红灯亮故障维修 焊接机械手维修 机器人控制器维护检查 1、拆换控制模块电池。 2、清洁抽真空控制箱。 3、拆换过滤装置。 4、检验电缆和电源连接器。 5、检测示教器功能模块。 6、清洁和检验风扇装制。 补偿状态,并验证全程工作轨迹,路径正确无异常,现场确认机器人备份,现场负责人,工程师确认状态,验收,发那科维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例发那科维修案例发那科机器人伺服驱动器维修故障/12。 安川机器人驱动器维修,安川伺服驱动单元维修,机器人示教器维修,安川伺服驱动器维修,史陶比尔机器人维修,针对安川驱动器过流缺相报警维修,安川伺服控制器维修,机器人电路板维修安川伺服放大器维修,安川伺服驱动器维修常见故障:无显示维修。
 kawasaki机器人LED2红灯亮故障维修 焊接机械手维修 机器人维护 1、检验液压密封件是否有瑕疵。 2、检验机器人电缆联接。 3、润滑脂机械传动装置。 4、拆换机器人电池。 5、开展电机制动系统打滑检测。 6、轴背隙/端游检验。 7、检验限位控制。
kawasaki机器人LED2红灯亮故障维修 焊接机械手维修 机器人维护 1、检验液压密封件是否有瑕疵。 2、检验机器人电缆联接。 3、润滑脂机械传动装置。 4、拆换机器人电池。 5、开展电机制动系统打滑检测。 6、轴背隙/端游检验。 7、检验限位控制。
显示过电压或欠电压,显示过电流或接地短路,电源与驱动板启动显示过电流,空载输出电压正常,带载后显示过载或过电流,向客户提供快速,,的维修服务全力服务工业自动化用户,我们为地区客户提供本地化维修服务。 显示过电压或欠电压,显示过电流或接地短路,电源与驱动板启动显示过电流,空载输出电压正常,带载后显示过载或过电流,向客户提供快速,,的维修服务全力服务工业自动化用户,我们为地区客户提供本地化维修服务。
刀台往前冲,至超程报警故障原因分析:查CNC系统,查编程*(编程错误)解决方法:有一个程序少了一个小数点(19)故障现象:快速时,Z轴上下抖动,无报警故障原因分析:查放大量过大,查加/减速过短(加/减速过短)解决方法:调整伺服板放大器上的补偿电容,增大电容量,正常(20)故障现象:机床乱走故障原因分析:查内部程序。
机器人仍不能移动,主要原因:1.外部暂停有效,2.有错误出现,3.母板的连接器X210没有连接,4.马达刹车没有释放,5.检查模式中,示教器上的检查前进(步骤前进键)没有按下,或握杆触发开关被松开,6.再现模式下。jvfufymukyu