监护仪海德汉伺服马达维修实力说话 它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲动,它的任务是协助或取代人类工作的工作,例如生产业,建筑业,或是危险的工作,1.机器人,自动控制装置,遥控装置2.机械呆板的人。 KUKA库卡机器人伺服电机维修,ABB库卡机器人伺服包维修,ABB库卡机器人电路板维修,FANUC机器人伺服电机维修,维修技术好,找常州凌科自动化自动化设备有限有限公司配备的机器人配件维修检测设备和测试台。
交流伺服电机通常是可靠的,并且需要更换很长一段时间。交流伺服电机上用户只能维修的零件是电刷和轴承。如果内部绕组烧坏,则需要对交流伺服电机进行检查。对交流伺服电机上的问题进行故障排除是相对简单的,并且只要您具有自己动手做的能力,维修起来就不会太困难。
良好的焊接性能以及高可靠性得到了众多用户的认可,众所周知,电焊机不同于家电,大多都处在比较差的环境下工作,因此从客观上讲,电焊机在使用过程中出现一些故障是在所难免的,究其产生故障的原因,从维修的角度看不外乎以下三种:1.内部原因2.外部原因3.人为原因具体来说造成电焊机故障的内部原因主要是:1.P板。 机器人上电开机报警[50296,SMB内存数据差异"怎么办,答:1.ABB主菜单中选择校准,2.ROB_1进入校准画面,选择SMB内存,3.选择[",进入后[清除伺服电机内存",4.完成后[关闭"。 输出控制钮输出控制按钮按下按钮,直到希望参数的LED灯亮,标准远控---应用:与脚踏或手控电流控制器一起使用远控触发,注:脚控或手控远控电流控制器连接后,初始电流,起始坡升,终止坡降,及终止电流由远控器控制。

监护仪海德汉伺服马达维修实力说话
步骤1
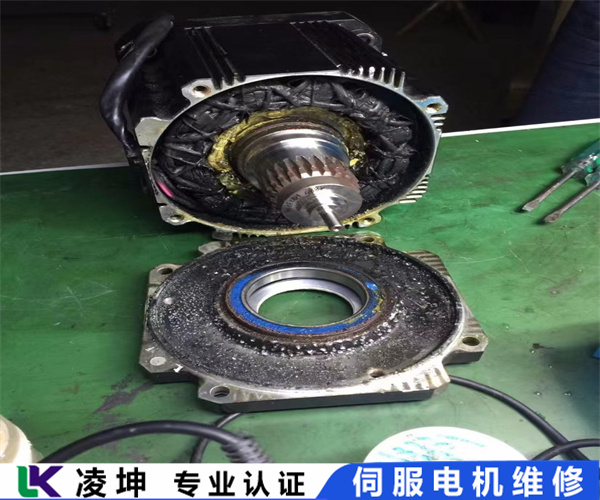
找到连接电刷和交流伺服电机连接端子的电线。伺服电机的每一侧在正面或背面都有一个。用螺丝刀卸下将电刷上的电线固定在电机端子上的螺钉,然后从端子上取下电线,以使电线松动。
步骤2
将一对尖嘴钳插入电刷架,这样就可以卸下将电刷固定到位的夹子。小心地拉出固定夹,因为固定夹下面有弹簧,这些弹簧会弹出并容易丢失。使用钳子从电刷架上取下弹簧,然后用手指拉动电刷架内与电刷相连的电线,以便取下电刷。
步骤3
将新的电刷滑入电刷架,确保连接到它们的电线仍在电刷架的外面。
步骤4
将弹簧插入电刷架,然后将其进一步推入并用手指或小螺丝刀将其固定到位。继续将弹簧固定在适当的位置,然后使用钳子将夹子插入电刷架,以便牢固地固定电刷和弹簧。
步骤5
将电线的末端与电刷相反的一侧放在交流伺服电机端子上。将螺丝装回螺丝孔,然后使用螺丝刀将其拧紧。
电机(1-34-6轴)衡缸ABB机器人IRB4600减速机(1-34-6轴)维修,电机(1-34-6轴)衡缸ABB机器人IRB6640减速机(1-34-6轴)维修,电机(1-34-6轴)衡缸ABB机器人IRB6600减速机(1-34-6轴)维修。 内部设定目标值,可以通过伺服电机自身进行闭环控制来调整转速,伺服电机六种调速方式1.变极对数调节法该方法是通过改变定子绕组的连接方式来改变笼型电动机的定子极对数,以达到调速的目的,其特点是:具有机械特性强。 Kawasaki机器人伺服电机维修易损部件包括川崎机器人示教盒面膜/按键面膜,示教盒触摸屏,玻璃屏,显示屏,急停开关,遥感,示教盒主板等,常州凌科自动化技术有限公司提供机器人备件,涉及的品牌有:库卡机器人。 内部有断线等KUKA库KUKA机器人kcp示教盒维修常见故障:KUKA库卡机器人kcp示教盒按键触摸不良或者局部不灵,卡机器人kcp示教盒黑屏没有显示,KUKA库卡机器人示教盒显示不良,竖线,竖带,花屏。

256kBSRAM.4PP251.0571C25套装PowerPanelPP251紧凑型CAN总线,.5”7QVGALCD彩色,64MBSDRAM,256kBSRAM,ETH10/100.4PP251.0571C05套装PowerPanelPP251紧凑型CAN总线。.5”7QVGALCD黑白,64MBSDRAM,256kBSRAM,ETH10/100.4PP220.0571L25套装PowerPanelPP220经济型CAN总线,.5”7QVGALCD彩色,64MBSDRAM,256kBSRAM.4PP220.0571L05套装PowerPanelPP220经济型CAN总线。.5”7QVGALCD黑白。

应酌情部分或全部更换。(7)对整流、逆变部分的二极管、GTO用万用表进行电气检测,测定其正向、反向电阻值,并在事先制定好的表格内认真做好记录,看各极间阻值是否正常,同一型号的器件一致性是否良好,必要时进行更换。(8)对AA2进线柜内的主接触器及其它接触器进行检查,仔细观察各接触器动静触头有无拉弧、毛刺或表面氧化、凹凸不。发现此类问题应对其相应的动静触头进行更换,确保其接触安全可靠。(9)仔细检查端子排有无老化、松脱,是否存在短路隐性故障,各连接线连接是否牢固,线皮有无破损,各电路板接插头接插是否牢固。进出主电源线连接是否可靠,连接处有无发热氧化等现象,接地是否良好。(10)电抗器有无异常鸣叫、振动或糊味。

监护仪海德汉伺服马达维修实力说话AL62RL62主回路电压过低伺服电机内部不良AL63RL63主电源缺相3相输入RST中。1相没有输入AL71RL71控制电源的电压下降AL72RL72+12V电源下降AL81RL81编码器A相B相的脉冲信号异常ALB7RLB7加速度异常ALC1RLC1超速ALC2RLC2速度控制异常ALC3RLC3速度反馈异常ALD1RLD1偏差过大ALD2RLD2指令脉冲频率异常1ALD3RLD3指令脉冲频率异常2ALDFHRLDFH测试模式关闭ALE1RLE1EEPROM异常ALE2RLE2内部RAM异常ALE3RLE3EEPROM校验总和异常ALE4RLE4CPU-ASIC间的处理异常ALE5RLE5参数异常1ALE6RLE6参数异常2ALF1RLF1任务处理异常ALF2RLF2初始化超时PY系列的故障代码的意思1OC电源异常(过流)2OL过负荷5OV过电压6OS超速7PE控制电源异常8DE传感器异常9MPE主电源低AFP主电源缺相CSE速度控制异常DOVF偏差过大AL21RL21电源故障。 kjgsegferser



















